Rotationally Invariant Object recognition method using Capsule Networks
Note: This research is currently in progress. Hence, much details will not be discussed here. The above image is representative only and a reference link to the owner is given
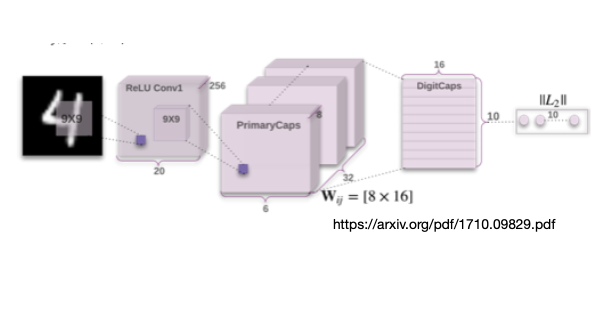
The goal of this work is to build an object recognition model using capsule networks and inherit it's rotational invariance properties. The research is inspired amd is built upon Dr. Geoffrey Hinton's Dynamic Routing between capsules
Problem with existing CNN based methods: In a regualar convolutional network, rotational and pose invariance will not be seen, though translational invariance can be seen. Any CNN based models could not be able to recognise images when they are presented in different angles or in different poses, unless they are trained on all these possible angles, poses and rotation through augmentation. This does'nt seem to be 'intelligent' as humans wont have to see an object in all possible poses to recognise it. Also there is a problem with max pool layers. These layers during the pooling, will loose all the spatial information. Dr. Hinton says "The pooling operation used in convolutional neural networks is a big mistake and the fact that it works so well is a disaster." Capsule networks are introduced to circumvent this problem.
The objective of my research is to use capsule networks to build an objection recogition model and test its rotational invariance. This model has achieved an improved rotational invariance of 2.7% on images with -90° to +90° rotation and 8.1% on images with -45° to +45° rotation